2.2 Catkin工作空间
Catkin工作空间是创建、修改、编译catkin软件包的目录。catkin的工作空间,直观的形容就是一个仓库,里面装载着ROS的各种项目工程,便于系统组织管理调用。在可视化图形界面里是一个文件夹。我们自己写的ROS代码通常就放在工作空间中,本节就来介绍catkin工作空间的结构。
2.2.1 初始化catkin工作空间
介绍完catkin编译系统,我们来建立一个catkin的工作空间。首先我们要在计算机上创建一个初始的catkin_ws/路径,这也是catkin工作空间结构的最高层级。输入下列指令,完成初始创建。
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/
$ catkin_make #初始化工作空间
第一行代码直接创建了第二层级的文件夹src,这也是我们放ROS软件包的地方。第二行代码使得进程进入工作空间,然后再是catkin_make。
注意:1. catkin_make命令必须在工作空间这个路径上执行 2.原先的初始化命令catkin_init_workspace仍然保留
2.2.2 结构介绍
catkin的结构十分清晰,具体的catkin工作空间结构图如下。初看起来catkin工作空间看起来极其复杂,其实不然,catkin工作空间的结构其实非常清晰。
在工作空间下用tree命令,显示文件结构。
$ cd ~/catkin_ws
$ sudo apt install tree
$ tree
结果为:
─ build
│ ├── catkin
│ │ └── catkin_generated
│ │ └── version
│ │ └── package.cmake
│ ├──
......
│ ├── catkin_make.cache
│ ├── CMakeCache.txt
│ ├── CMakeFiles
│ │ ├──
......
├── devel
│ ├── env.sh
│ ├── lib
│ ├── setup.bash
│ ├── setup.sh
│ ├── _setup_util.py
│ └── setup.zsh
└── src
└── CMakeLists.txt -> /opt/ros/kinetic/share/catkin/cmake/toplevel.cmake
通过tree命令可以看到catkin工作空间的结构,它包括了src、build、devel三个路径,在有些编译选项下也可能包括其他。但这三个文件夹是catkin编译系统默认的。它们的具体作用如下:
- src/: ROS的catkin软件包(源代码包)
- build/: catkin(CMake)的缓存信息和中间文件
- devel/: 生成的目标文件(包括头文件,动态链接库,静态链接库,可执行文件等)、环境变量
在编译过程中,它们的工作流程如图:
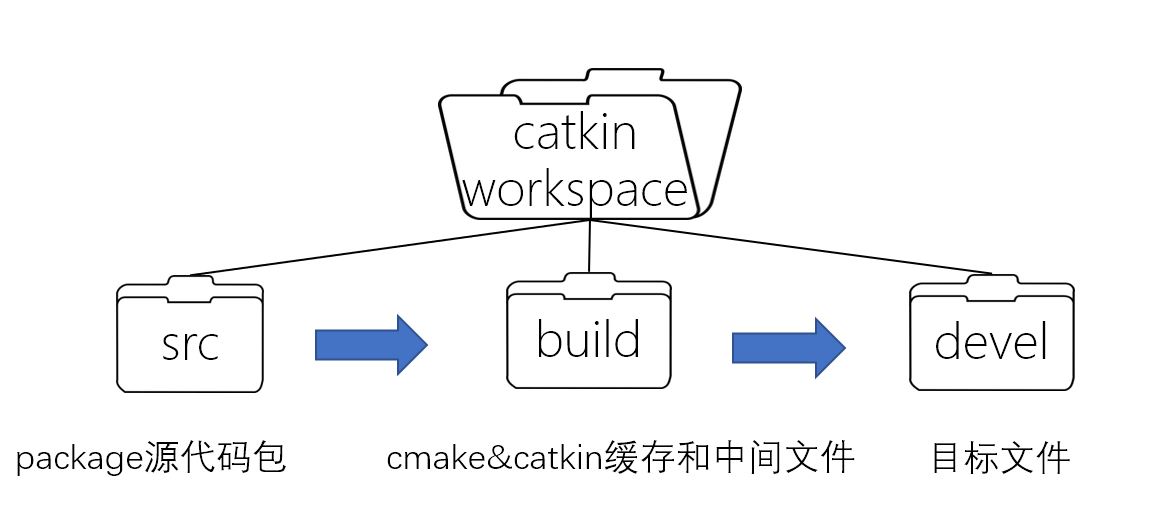
后两个路径由catkin系统自动生成、管理,我们日常的开发一般不会去涉及,而主要用到的是src文件夹,我们写的ROS程序、网上下载的ROS源代码包都存放在这里。
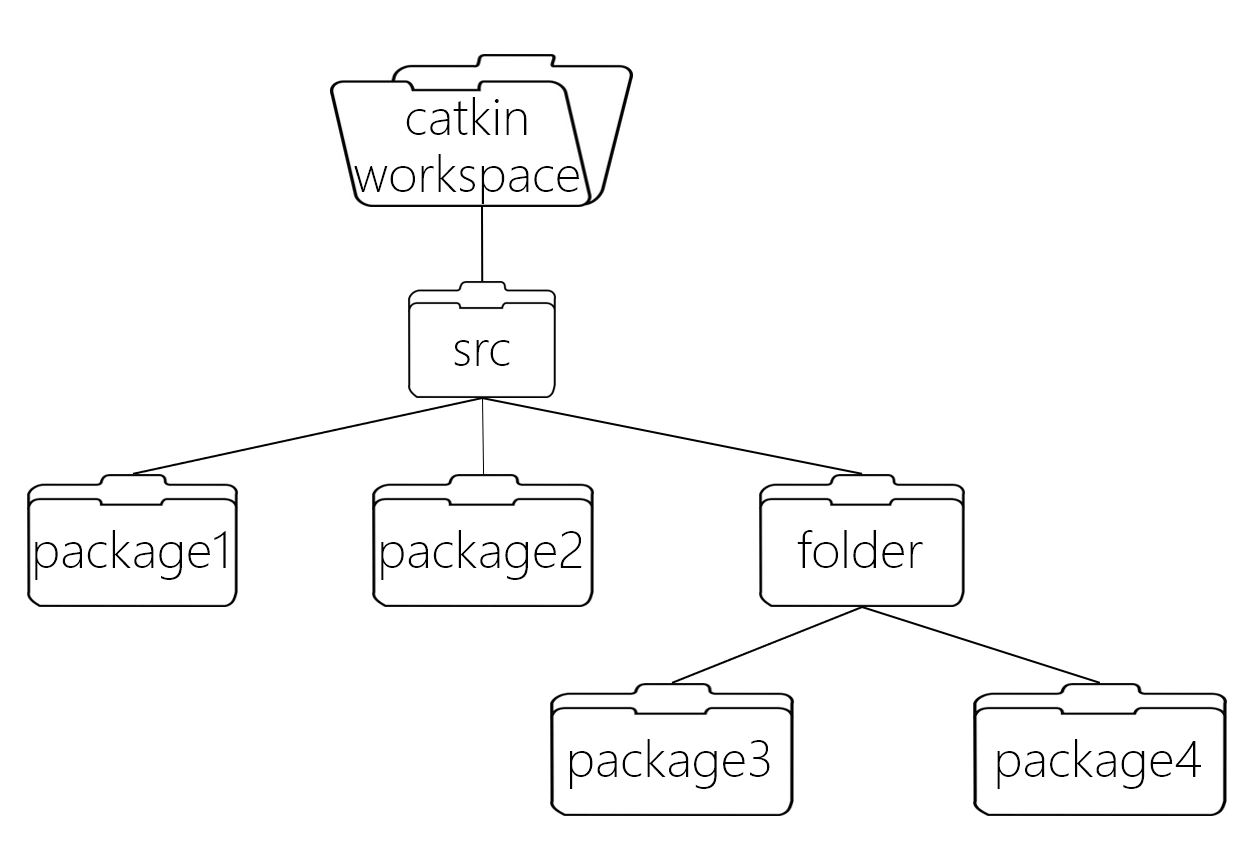
在编译时,catkin编译系统会递归的查找和编译src/下的每一个源代码包。因此你也可以把几个源代码包放到同一个文件夹下,如下图所示:
小结
catkin工作空间基本就是以上的结构,package是catkin工作空间的基本单元,我们在ROS开发时,写好代码,然后catkin_make,系统就会完成所有编译构建的工作。至于更详细的package内容,我们将在下节继续介绍。