6.1 Client Library与roscpp
6.1.1 Client Library简介
ROS为机器人开发者们提供了不同语言的编程接口,比如C++接口叫做roscpp,Python接口叫做rospy,Java接口叫做rosjava。尽管语言不通,但这些接口都可以用来创建topic、service、param,实现ROS的通信功能。Clinet Lirary有点类似开发中的Helper Class,把一些常用的基本功能做了封装。
目前ROS支持的Clinet Library包括:
| Client Library | 介绍 |
|---|---|
| roscpp | ROS的C++库,是目前最广泛应用的ROS客户端库,执行效率高 |
| rospy | ROS的Python库,开发效率高,通常用在对运行时间没有太大要求的场合,例如配置、初始化等操作 |
| roslisp | ROS的LISP库 |
| roscs | Mono/.NET.库,可用任何Mono/.NET语言,包括C#,Iron Python, Iron Ruby等 |
| rosgo | ROS Go语言库 |
| rosjava | ROS Java语言库 |
| rosnodejs | Javascript客户端库 |
| ... | ... |
目前最常用的只有roscpp和rospy,而其余的语言版本基本都还是测试版。
从开发客户端库的角度看,一个客户端库,至少需要能够包括master注册、名称管理、消息收发等功能。这样才能给开发者提供对ROS通信架构进行配置的方法。
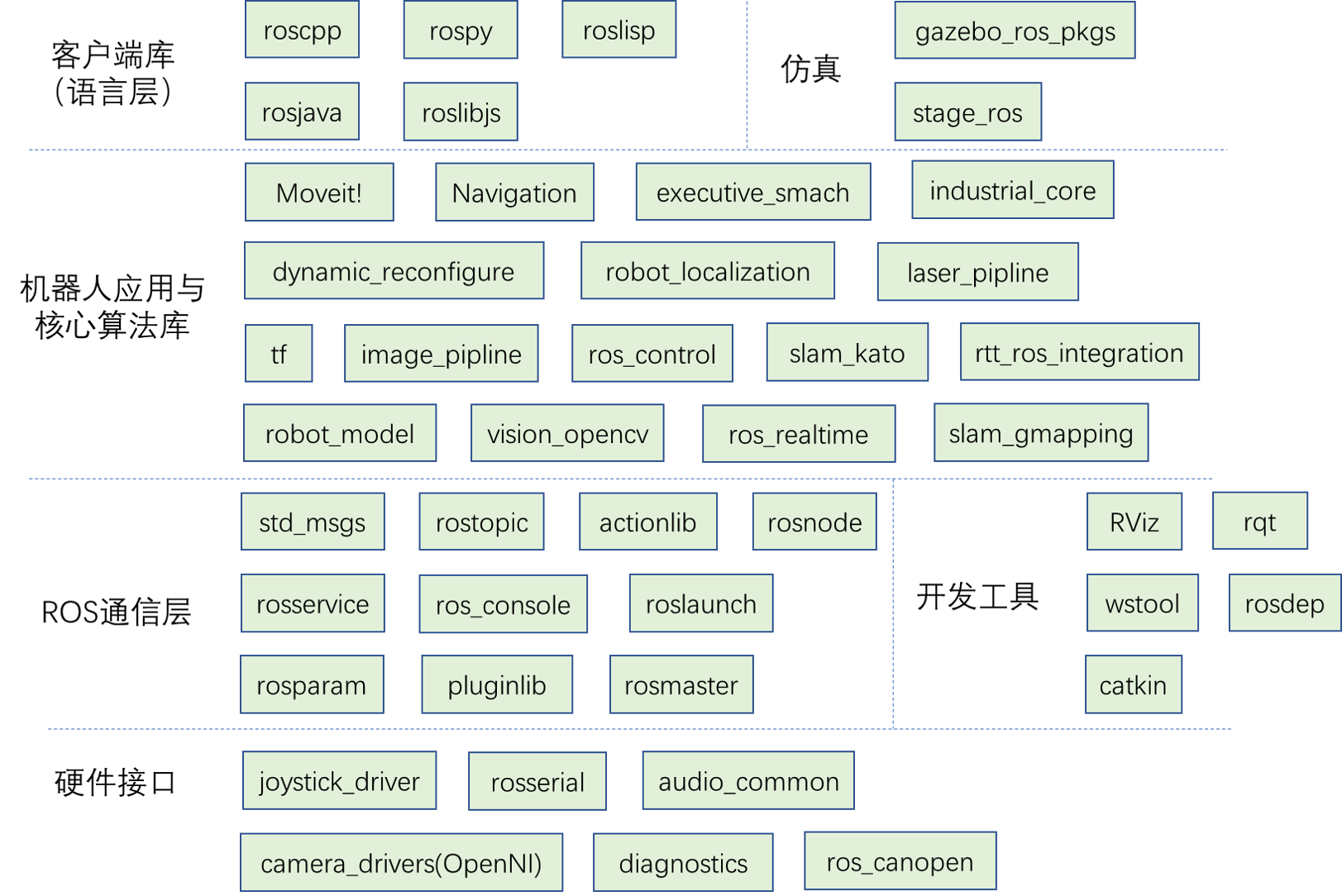
整个ROS包括的packages如下,你可以看到roscpp、rospy处于什么位置。
6.1.2 roscpp
roscpp位于/opt/ros/kinetic之下,用C++实现了ROS通信。在ROS中,C++的代码是通过catkin这个编译系统(扩展的CMake)来进行编译构建的。所以简单地理解,你也可以把roscpp就当作为一个C++的库,我们创建一个CMake工程,在其中include了roscpp等ROS的libraries,这样就可以在工程中使用ROS提供的函数了。
通常我们要调用ROS的C++接口,首先就需要#include <ros/ros.h>。
roscpp的主要部分包括:
- ros::init() : 解析传入的ROS参数,创建node第一步需要用到的函数
- ros::NodeHandle : 和topic、service、param等交互的公共接口
- ros::master : 包含从master查询信息的函数
- ros::this_node:包含查询这个进程(node)的函数
- ros::service:包含查询服务的函数
- ros::param:包含查询参数服务器的函数,而不需要用到NodeHandle
- ros::names:包含处理ROS图资源名称的函数
具体可见:http://docs.ros.org/api/roscpp/html/index.html
以上功能可以分为以下几类:
- Initialization and Shutdown 初始与关闭
- Topics 话题
- Services 服务
- Parameter Server 参数服务器
- Timers 定时器
- NodeHandles 节点句柄
- Callbacks and Spinning 回调和自旋(或者翻译叫轮询?)
- Logging 日志
- Names and Node Information 名称管理
- Time 时钟
- Exception 异常
看到这么多接口,千万别觉得复杂,我们日常开发并不会用到所有的功能,你只需对要有一些印象,掌握几个比较常见和重要的用法就足够了。下面我们来介绍关键的用法。