9.3 Karto
9.3.1 Karto SLAM计算图
Karto SLAM和Gmapping SLAM在工作方式上非常类似,如下图所示
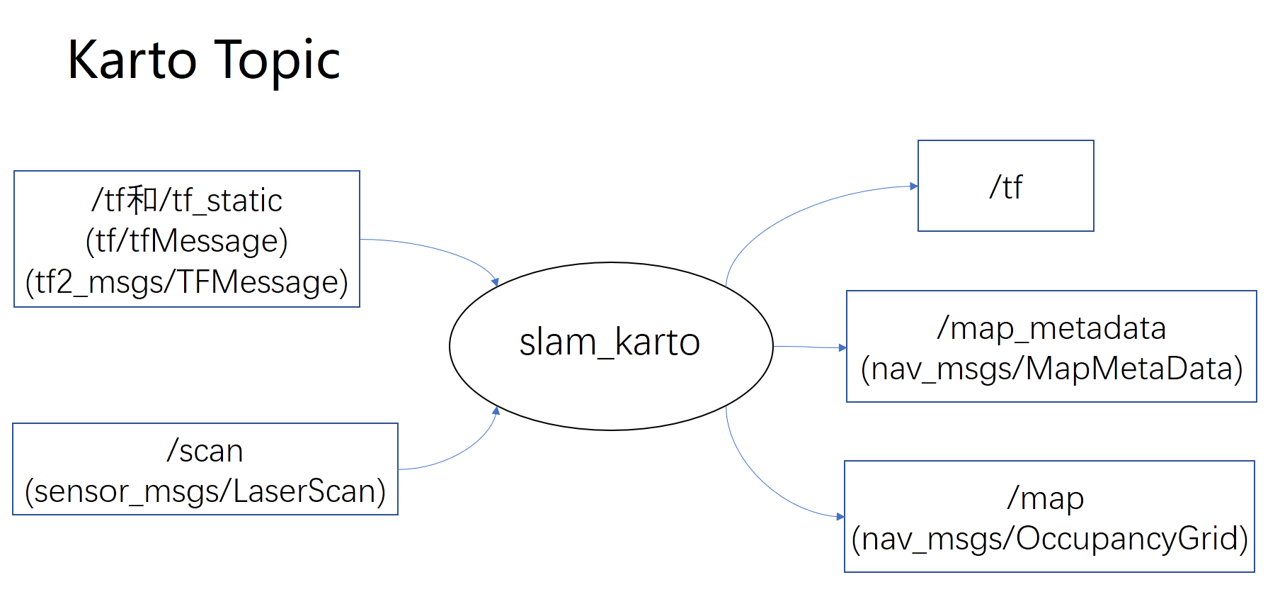
输入的Topic同样是/tf和/scan,其中/tf里要连通odom_frame与base_frame,还有laser_frame。这里和Gmapping完全一样。
唯一不同的地方是输出,slam_karto的输出少相比slam_gmapping了一个位姿估计的分散程度.
9.3.2 服务
与Gmapping相同,提供/dynamic_map服务
9.3.3 参数
这里以ROS-Academy-for-Beginners中的karto_slam为例,选取了它的参数文件slam_sim_demo/param/karto_params.yaml,关键位置做了注释:
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.2
minimum_travel_heading: 0.174 #in radians
scan_buffer_size: 70
scan_buffer_maximum_scan_distance: 20.0
link_match_minimum_response_fine: 0.8
link_scan_maximum_distance: 10.0
loop_search_maximum_distance: 4.0
do_loop_closing: true
loop_match_minimum_chain_size: 10
loop_match_maximum_variance_coarse: 0.4 # gets squared later
loop_match_minimum_response_coarse: 0.8
loop_match_minimum_response_fine: 0.8
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 0.3
correlation_search_space_resolution: 0.01
correlation_search_space_smear_deviation: 0.03
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 8.0
loop_search_space_resolution: 0.05
loop_search_space_smear_deviation: 0.03
# Scan Matcher Parameters
distance_variance_penalty: 0.3 # gets squared later
angle_variance_penalty: 0.349 # in degrees (gets converted to radians then squared)
fine_search_angle_offset: 0.00349 # in degrees (gets converted to radians)
coarse_search_angle_offset: 0.349 # in degrees (gets converted to radians)
coarse_angle_resolution: 0.0349 # in degrees (gets converted to radians)
minimum_angle_penalty: 0.9
minimum_distance_penalty: 0.5
use_response_expansion: false
演示截图