5.6 moveit!
5.6.1 简介
2012年,一款叫做moveit!的移动操作软件诞生了,moveit!最初在Willow Garage由Sachin Chitta,Ioan Sucan,Gil E. Jones,Acorn Pooley,Suat Gedikli,Dave Hershberger开发,它融合了研究者在运动规划、操纵、3D感知、运动学、控制和导航方面的最新进展,为操作者提供了一个易于使用的平台,使用它可以开发先进的机器人应用,也被广泛应用于工业,商业,研发和其他领域。由于以上特性,moveit!一跃成为在机器人上最广泛使用的开源操作软件,截止2017年,已经被用于超过65台机器人。
5.6.2 使用
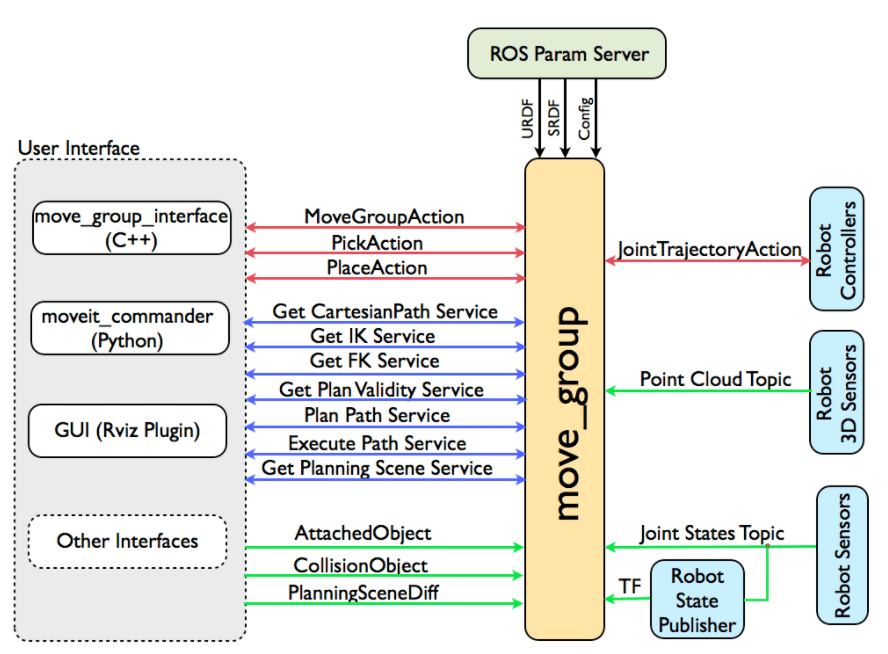
moveit!的使用通过为用户提供接口来调用它,包括C++、Python、GUI三种接口。ROS中的move_group节点充当整合器,整合多个独立组件,提供ROS风格的Action和service。move_group通过ROS topic和action与机器人通讯,获取机器人的位置、节点等状态,获取数据再传递给机器人的控制器。
move_group节点获取到节点状态信息或者机器人变换信息时候,会通过控制器的接口去处理这些信息,比如进行坐标转换、规划场景、3D感知。另外,move_group的结构比较容易扩展,不仅具有独立的能力如抓放,运动规划,也可扩展自公共类,但实际作为独立的插件运行。moveit!系统结构图如下: