第九章 SLAM
本章简介
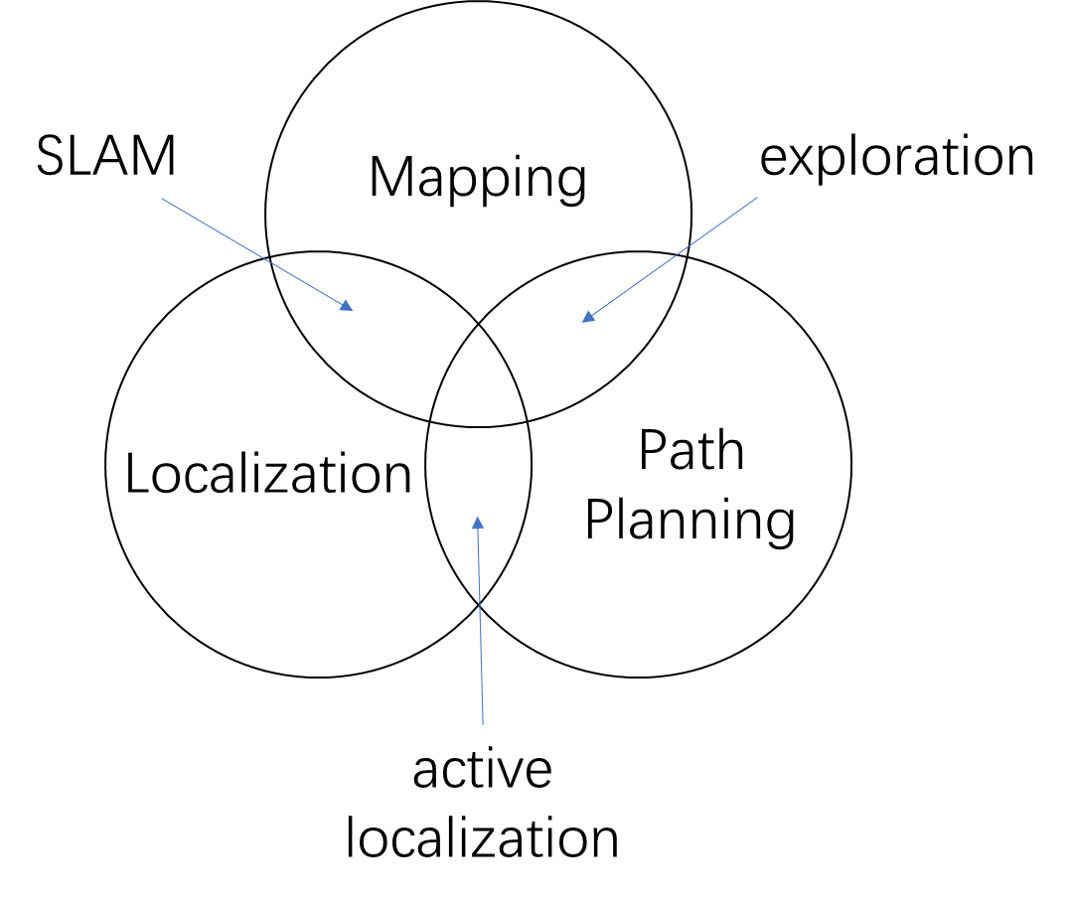
机器人研究的问题包含许许多多的领域,我们常见的几个研究的问题包括:建图(Mapping)、定位(Localization)和路径规划(Path Planning),如果机器人带有机械臂,那么运动规划(Motion Planning)也是重要的一个环节。而同步定位与建图(SLAM)问题位于定位和建图的交集部分。
SLAM需要机器人在未知的环境中逐步建立起地图,然后根据地区确定自身位置,从而进一步定位。
 这一章我们来看ROS中SLAM的一些功能包,也就是一些常用的SLAM算法,例如Gmapping、Karto、Hector、Cartographer等算法。这一章我们不会去关注算法背后的数学原理,而是更注重工程实现上的方法,告诉你SLAM算法包是如何工作的,怎样快速的搭建起SLAM算法。
这一章我们来看ROS中SLAM的一些功能包,也就是一些常用的SLAM算法,例如Gmapping、Karto、Hector、Cartographer等算法。这一章我们不会去关注算法背后的数学原理,而是更注重工程实现上的方法,告诉你SLAM算法包是如何工作的,怎样快速的搭建起SLAM算法。